به نام خدا
در این قسمت میخوام درباره ساخت فلایت کنترل توضیح بدم . اول بگم فلایت کنترل چیه؟
فلایت کنترل یک برد الکترونیکی هست که پرواز کوادکوپتر رو کنترل میکنه . خیلی ساده توضیح بدم : تعادل کواد کوپتر رو در هوا حفظ میکنه
حالا این فلایت کنترلی که میخوایم بسازیم چیجوریه؟ به شماتیک زیر توجه کنین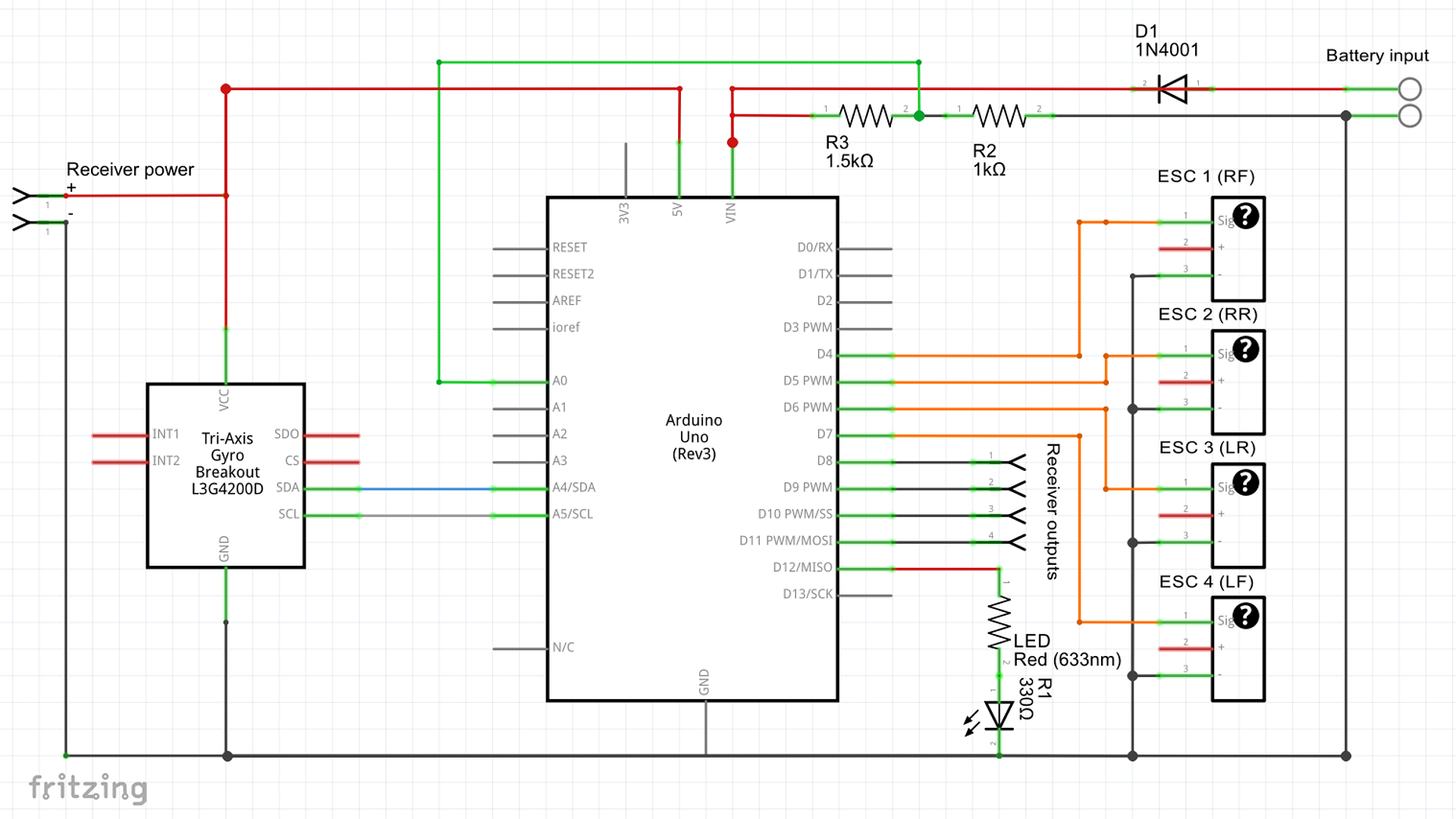
مدار را شبیه شماتیک بالا لحیم کنید . حتما لحیم کنید . استفاده از بردبورد و پین های نری و مادگی ممنوع .
همونطور که میبینید در این مدار از l3g4200 استفاده شده و اتصال پایه های اون رو میبینید اگر این سنسور رو نداشتین میتونین از mpu6050 استفاده کنید و فرقی با اون نداره
اون ال ای دی هم ال ای دی هشدار هست و وقتی رادیو کنترل خاموش باشه هشدار میده یا باتری داره تموم میشه هشدار میده و مثلا وقتی سنسور جایرو شما داره کالیبره میشه هشدار میده . هشدار های اون بصورت چشمک زدن با فاصله زمانی هست که بعدا بیشتر توضیح میدم
از پایه 8 تا 11 برای گیرنده رادیو کنترل هست
8 = roll
9= pitch
10 = yaw
11= throttle
اینم از تزتیب پایه ها
از 4 تا 7 هم برای اسپید کنترل هست
4=راست جلو
5= راست عقب
6= چپ عقب
7 = چپ جلو

مقاومت 1 و 1.5 کیلو که به پایه a0 میره برای سنجش مقدار باتری لیتیم پلیمر هست.
حالا سنسور رو چیجوری بچسبونید . محور x سنسورتون رو به سمت جلوی کواد کوپتر قرار بدین مانند شکل زیر:::::::::(( چه mpu6050 هست چه l3g4200 فرقی نمیکنه)) .
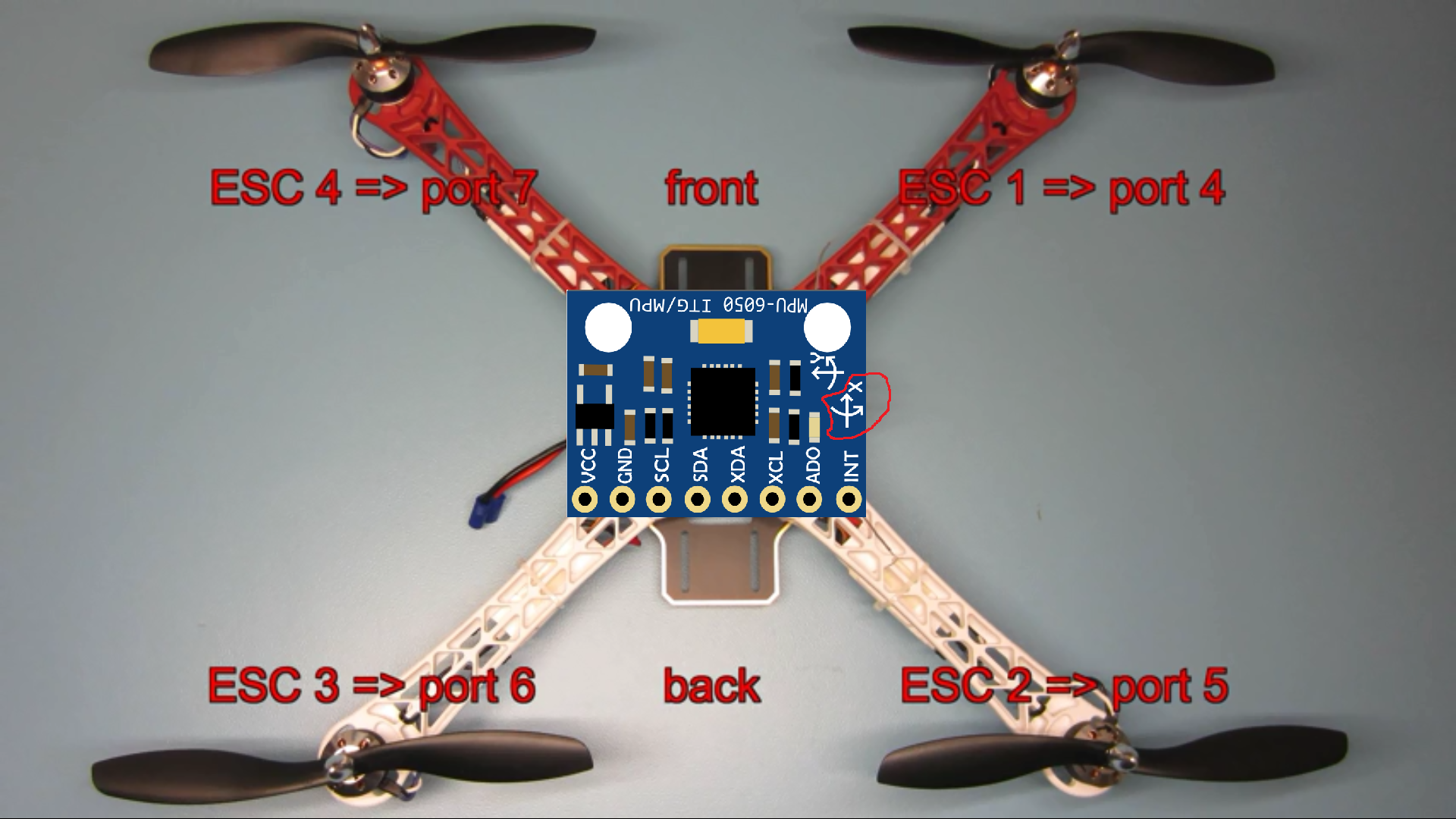
یادم رفت بگم این کواد کوپتر یک کواد کوپتر مدل x هست و مناسب برای فیلم برداری . یک نوع کواد کوپتر دیگه هم هست بنام + یا پلاس که زیاد واسه فیلم بردای ازش استفاده نمیکنن.
مدار رو طبق توضیحاتی که دادم لحیم کنید و رو ی فریم ((بدنه )) نصب کنید .
نکته :
از سیم های کوتاه استفاده کنید
تغذیه گیرنده رادیو کنترل رو از آردوینو بگیرید
از برد بورد استفاده نکنید
تغذیه سنسور ژیروسکوپ یادتون نره
تو قسمت بعدی میخوام برنامه های این کواد کوپتر رو براتون بزارم . منتظر باشین . اگه جایی به مشکل برخوردین حتما تو قسمت نظرات بگین که سریعا پاسخ میدم .
منبع : آقای joop brokking
سایت brokking.net

 صادق
صادق